طالبتان من كلية الهندسة تصممان روبوتاً آلياً
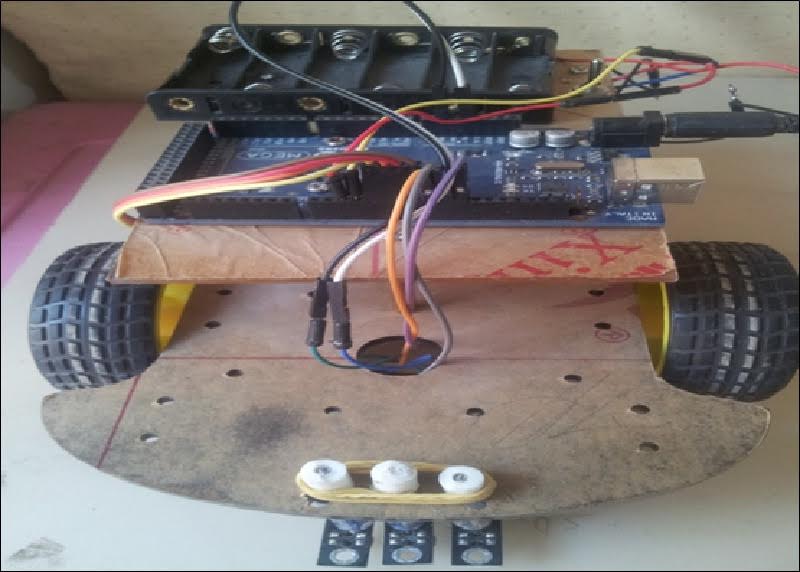
قامت الطالبتان من كلية الهندسة بجامعة ديالى بشائر عبد السلام وشهد محمد وبإشراف الدكتور محمد سلمان صالح بتصميم روبوتٍ آلي حديث يتكون من عجلتين لغرض التوجيه والحركة وعجلة ثالثة لغرض التوازن .
تم تصحيح حركة الروبوت من خلال قراءات مستمرة باستخدام ثلاث متحسسات للأشعة تحت الحمراء تكون مثبته في مقدمة الروبوت يتم التوجيه من خلال مقارنة القراءات للمتحسسات الثلاثة فيما بينها لغرض تحديد موقع الروبوت نسبة الى المسار المحدد وتصحيح وتغيير اتجاه حركة الروبوت يكون من خلال التحكم بسرعة العجلتين الاماميتين حسب ما مطلوب ويمكن استخدام مثل هكذا روبوت لاستخدامات خاصة لغرض التجوال بين محطات محددة يكلف بها الروبوت لأداء عمل معين .


اخر تحديث في 08/04/2023


